Self-Powering Drones: 6G Networks and Energy Harvesting for Endless Flight
A new paper explores how hierarchical drone networks, leveraging 6G communication (NOMA) and non-linear energy harvesting, can drastically reduce communication outages and extend operational endurance for UAVs.
TL;DR: This paper digs into how future 6G drone networks can power themselves. By combining a hierarchical drone relay system with Non-Orthogonal Multiple Access (NOMA) and realistic non-linear energy harvesting from ground beacons, they significantly reduce communication failures, paving the way for drones that stay airborne much longer.
The dream of truly autonomous drones isn't just about AI; it's about staying power. We're talking about drones that can operate for hours, days, or even weeks without needing to land for a battery swap. This vision is rapidly becoming reality. New research from Khennoufa et al. tackles a critical piece of this puzzle: how drones can communicate reliably and, crucially, keep their batteries topped up mid-flight using next-gen networks and clever energy harvesting.
The Drone's Persistent Problem: Power and Connection
Current drone operations are fundamentally limited by battery life. Even with advanced power management and efficient motors, a drone's flight time is finite, demanding frequent recharging or battery swaps. This logistical overhead drives up operational costs significantly and restricts mission duration for everything from high-value package delivery to long-term infrastructure surveillance. Moreover, ensuring reliable communication for multi-drone systems, especially in dynamic or obstructed environments, is a persistent challenge. Traditional communication methods often struggle, leading to data loss, delayed commands, or even mission failures. Extending flight time and guaranteeing robust communication are essential for widespread, cost-effective drone adoption in public and civil domains. Without innovative solutions for sustained power and truly reliable connectivity, the full promise of multi-UAV systems supporting vast IoT networks remains largely unfulfilled, stuck in a cycle of short flights and connectivity gaps.
A Two-Tiered Strategy for Endurance and Reach
The researchers propose a clever two-tiered ad hoc network architecture, depicted in Figure 1, that aims to solve these issues. At the top, you have a Cluster Head UAV (CHU) acting as the central source, perhaps collecting data from a wide area or serving as a communication hub. Below it, several Cluster Member UAVs (CMUs) function as relays, extending the range and robustness of the network. These CMUs aren't just passively passing data; they're also actively harvesting energy.
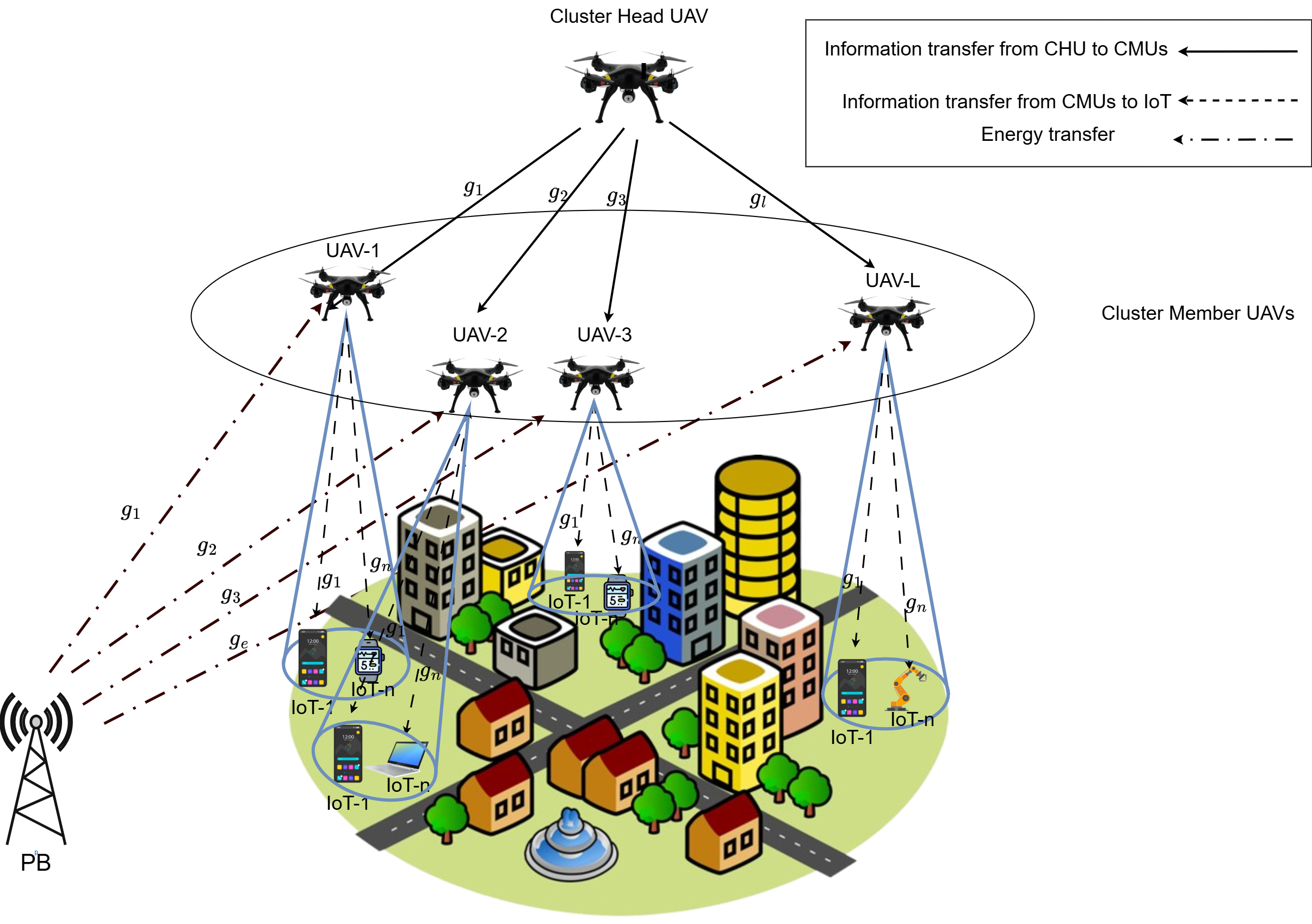 Figure 1: Hierarchical ad hoc UAV network with EH system model.
Figure 1: Hierarchical ad hoc UAV network with EH system model.
The CMUs harvest energy from a terrestrial power beacon, which could be a dedicated ground station emitting RF energy. Crucially, they use a non-linear energy harvesting model. This is a significant improvement over simpler linear models because it more accurately represents how real-world energy converters behave. It accounts for practical inefficiencies, power conversion thresholds, and saturation effects that limit how much energy can actually be captured and stored, making the analysis far more realistic. For communication, the entire system leverages Non-Orthogonal Multiple Access (NOMA). Unlike traditional Orthogonal Multiple Access (OMA) where users get separate time or frequency slots, NOMA allows multiple users (or in this case, IoT devices and CMUs) to transmit on the same frequency and time slot by using different power levels and successive interference cancellation at the receiver. This boosts spectral efficiency significantly, meaning more data can be sent more reliably over the same bandwidth. The paper rigorously analyzes the "outage probability" – the likelihood that a communication link fails below a required quality of service – for different parts of this system under realistic conditions like Nakagami-m fading channels (which model varying signal strength) and hardware impairments (accounting for imperfect components).
The Data Speaks: Boosting Reliability with NOMA and EH
The core finding is clear: integrating this realistic non-linear energy harvesting with NOMA fundamentally improves system reliability and endurance across the network.
- Ground IoT Device Reliability: Figure 2 illustrates the outage probability for ground IoT devices. The graph shows that even with
Hardware Impairments (HWI), the system can maintain acceptable performance, especially for devices with lower requiredthresholds. This indicates that the NOMA scheme effectively manages interference to deliver data to end-users.
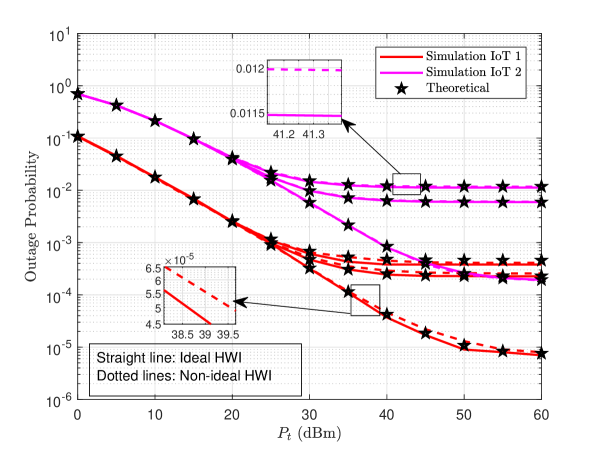 Figure 2: Outage probability performance of two ground IoT devices with different thresholds and HWI.
Figure 2: Outage probability performance of two ground IoT devices with different thresholds and HWI.
- Improved CMU Reliability: Figure 3 clearly shows a substantial drop in
CMU Outage ProbabilitywhenEnergy Harvesting (EH)is enabled compared to a non-EH system. This benefit is particularly pronounced at higherPth(power threshold) values, which represent the minimum required power for the CMU to operate. For instance, atPth=20 dBm, the EH-enabled system dramatically reduces outages, indicating greater stability for the CMU relays. This is a critical win for multi-UAV relay networks.
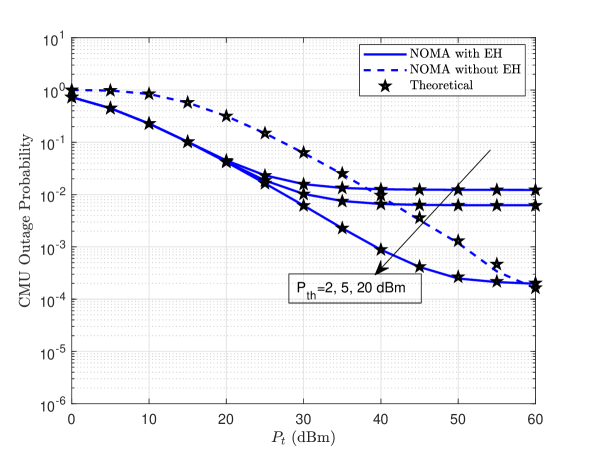 Figure 3: CMU Outage probability performance with different Pth={2,5,20}P_{\text{th}}={2,5,20} dBm values, when K=0.15K=0.15: Comparison between NOMA with EH and without EH.
Figure 3: CMU Outage probability performance with different Pth={2,5,20}P_{\text{th}}={2,5,20} dBm values, when K=0.15K=0.15: Comparison between NOMA with EH and without EH.
- Channel Robustness: Figure 4 further emphasizes the benefits of EH. It illustrates that the system's performance improves with higher
mvalues (channel severity parameter), meaning it's more robust in less severe fading conditions. Crucially, in allmscenarios, the EH-enabled system consistently outperforms the non-EH benchmark, highlighting its inherent resilience to channel variations.
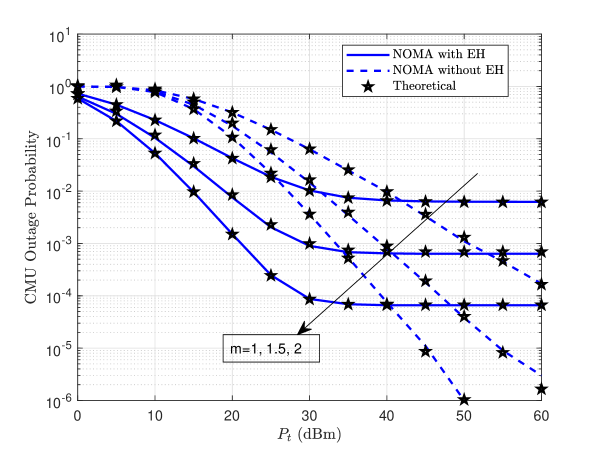 Figure 4: CMU Outage probability performance with different m={1,1.5,2}m={1,1.5,2} values, when K=0.15K=0.15: Comparison between NOMA with EH and without EH.
Figure 4: CMU Outage probability performance with different m={1,1.5,2}m={1,1.5,2} values, when K=0.15K=0.15: Comparison between NOMA with EH and without EH.
- Overall System Performance: The
Overall Outage Probabilityfor NOMA with EH generally decreases as the number ofCMUsincreases (Figure 5). This demonstrates the scalability of the hierarchical relay architecture, where adding more relays improves the network's reliability. The NOMA scheme also outperforms RSMA (Rate Splitting Multiple Access) in overall outage probability for various CMU counts, making a strong case for NOMA in such deployments.
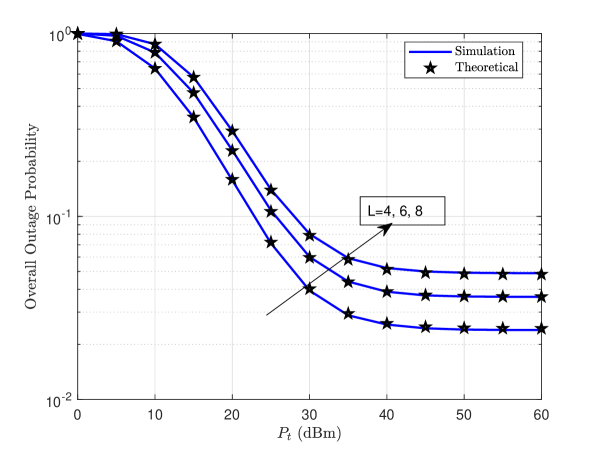 Figure 5: Overall outage probability for RSMA and NOMA with different numbers of CMU, L={4,6,8}L={4,6,8}.
Figure 5: Overall outage probability for RSMA and NOMA with different numbers of CMU, L={4,6,8}L={4,6,8}.
- Hardware Impairment Resilience: Even with significant
Hardware Impairments (HWI)– represented byK– up toK=0.15, the system with EH still maintains a significantly lower outage probability than without EH, particularly when power thresholds are higher (Figure 6). This is vital because real-world drone components are rarely perfect.
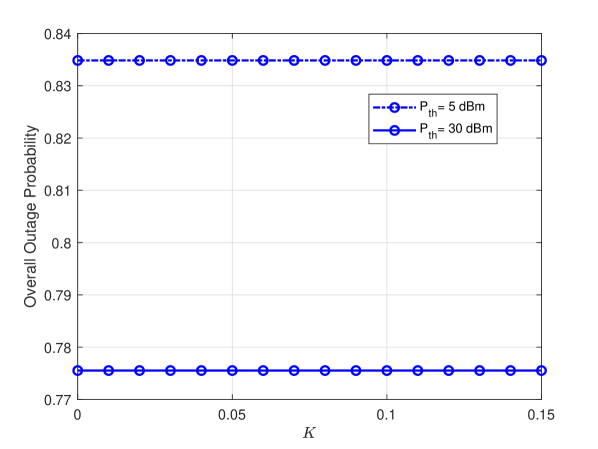 Figure 6: Overall outage probability w.r.t. HWI (KK) with different Pth={5,30}P_{\text{th}}={5,30} dBm.
Figure 6: Overall outage probability w.r.t. HWI (KK) with different Pth={5,30}P_{\text{th}}={5,30} dBm.
The results consistently show that combining NOMA with non-linear energy harvesting offers a robust solution for enhancing both the energy and communication efficiency of hierarchical drone networks, even under practical constraints.
Real-World Impact: What This Means for Drone Fleets
This research directly addresses the holy grail of drone operations: extended endurance and reliable communication.
- Long-Duration Missions: Picture surveillance drones that can patrol an area for days or weeks, intelligently recharging from strategically placed ground beacons without human intervention. Or inspection drones that can thoroughly survey vast infrastructure like pipelines, power lines, or wind farms, without needing to land for frequent battery swaps. This moves beyond hours of flight to persistent, continuous operation.
- Disaster Response & Emergency Networks: In areas where terrestrial communication infrastructure is damaged or non-existent, a hierarchical NOMA drone network could quickly establish robust, self-healing communication links for emergency services, powered by ad-hoc energy sources. This could be critical for search and rescue operations or coordinating relief efforts.
- IoT Network Extension & Smart Cities: Drones could act as persistent, self-sustaining mobile relays, extending connectivity for remote
IoTdevices in agriculture, environmental monitoring, or remote asset tracking. In smart city applications, they could provide dynamic network coverage for events or temporary needs, seamlessly integrating with the burgeoning6Gecosystem. - Cost Reduction & Scalability: Fewer battery changes mean significantly less human intervention, lower labor costs, and reduced capital expenditure on spare batteries and charging infrastructure. This transforms drones from specialized, labor-intensive tools into truly autonomous, scalable platforms capable of operating at a much larger scale and lower cost per operational hour.
Limitations & What's Missing
While promising, this paper is a theoretical analysis, not a field test, and has some practical considerations.
- Idealized Movement: The analysis largely assumes stationary UAVs for simplicity in channel modeling. Real-world drones are constantly moving, which introduces dynamic channel conditions and energy consumption patterns that aren't fully captured in this theoretical framework.
- Beacon Deployment: The reliance on terrestrial power beacons introduces significant deployment challenges. Where would these beacons be placed? What's their effective range and power output in varied urban, rural, or natural environments? These practical considerations for infrastructure development are outside the paper's scope.
- Energy Harvesting Efficiency: While using a non-linear model is an improvement, the actual efficiency of
RF-to-DCconversion on a small, lightweight drone is still a significant engineering challenge. Real-world efficiency can vary wildly with distance, orientation, and environmental factors, posing a hurdle for practical implementation. - Security & Interference: Operating in
6Gnetworks with NOMA and wireless power transfer introduces new vectors for interference and security vulnerabilities that are not addressed here. Robust protocols for securing these advanced networks will be critical for widespread adoption.
DIY Feasibility
Replicating this entire system at a hobbyist level is extremely challenging, if not impossible, today. The core of this work lies in complex mathematical modeling of advanced communication protocols (NOMA) and energy harvesting at the network layer.
- Hardware: You'd need custom
NOMA-capable transceivers, specializedRF energy harvestingmodules, and highly preciseUAVplatforms capable of maintaining specific formations and altitudes. These components are currently research-grade, expensive, and not available off-the-shelf for hobbyists. - Software: Implementing NOMA protocols and dynamic energy harvesting management requires deep knowledge of
telecommunications engineeringand customfirmware developmentfor both the drones and ground stations. - Open Source: There are no open-source frameworks that combine
NOMA,UAV ad-hoc networking, andnon-linear energy harvestingin a ready-to-deploy package. While hobbyists might experiment with simplersolar panelorinductive chargingsolutions for drones, the sophisticatedRF energy harvestingandNOMAprotocols discussed here are far beyond typical DIY scope for now.
The Broader Context: Smarter, More Persistent Drones
The concepts explored here are part of a larger push towards truly autonomous, long-endurance drones. For drones to operate effectively in these self-sustaining networks, they need to understand their environment just as well as they communicate. This is where advancements in 3D perception become critical. For example, DriveTok: 3D Driving Scene Tokenization for Unified Multi-View Reconstruction and Understanding by Zhuo et al. explores efficient ways for machines to perceive and understand complex 3D environments. If our CMUs are to operate as smart relays or surveillance platforms, they need to process visual data efficiently to minimize onboard computational load and energy drain, complementing the energy harvesting efforts.
Similarly, as drones capture more complex data for mapping or digital twins, transmitting these 3D representations efficiently is paramount. Guo et al.'s Matryoshka Gaussian Splatting offers a solution for rendering and transmitting 3D models at adjustable levels of detail. This kind of adaptive data transmission would work hand-in-glove with the efficient NOMA communication framework, ensuring drones can share rich information without overwhelming bandwidth.
Finally, for drones to make intelligent decisions within these advanced networks, they need sophisticated scene understanding. Wu et al.'s Generation Models Know Space: Unleashing Implicit 3D Priors for Scene Understanding tackles the 'spatial blindness' of current Vision-Language Models (VLMs). By enhancing a drone's geometric reasoning, it can navigate more safely, interact more effectively, and leverage the reliable communication and extended operational time provided by energy harvesting. This ensures the drone isn't just flying longer and communicating better, but also acting smarter within its environment.
The Path Forward
This research lays down a solid theoretical foundation for the next generation of drone autonomy, moving us closer to a future where drones aren't tethered by power cords or limited by spotty connectivity. The question now is: when will this robust, self-sustaining communication and power infrastructure move from simulations to widespread real-world deployment?
Paper Details
Title: Outage Probability Analysis of NOMA Enabled Hierarchical UAV Networks with Non-Linear Energy Harvesting Authors: Faicel Khennoufa, Khelil Abdellatif, Metin Ozturk, Halim Yanikomeroglu, Safwan Alfattani Published: March 26, 2024 (on arXiv) arXiv: 2603.19214 | PDF
Written by
Mini Drone Shop AISharing knowledge about drones and aerial technology.