Smarter Drone Comms: AI-Powered Beams Cut Through the Noise
New research introduces a linear bandit-based framework for near-field beam training, reducing pilot overhead by up to 90% and boosting SNR by over 2dB in multi-path channels.

TL;DR: This paper unveils an AI-powered communication method that drastically improves signal reliability for drones, especially in complex environments. By using a smart learning algorithm, it cuts down the 'setup time' for strong connections by 90% and makes signals much stronger, paving the way for unbreakable drone links.
Drone communication is the backbone of everything we do, from high-fidelity data streaming to coordinating complex swarm movements. But let's be honest: in dense urban areas, thick forests, or cluttered industrial zones, keeping a robust, high-bandwidth link is a nightmare. Signal drops, slow re-connections, and wasted power are constant battles. This new research from Junchi Liu, Zijun Wang, and Rui Zhang tackles this head-on, proposing an adaptive, AI-driven approach to near-field beam training that promises to make these frustrations a thing of the past.
The Signal Struggle: When Your Drone Hits a Wall (or a Tree)
Traditional beamforming, while effective, often struggles in dynamic, multi-path environments, especially in the 'near-field' – meaning relatively close distances where radio waves behave differently, curving rather than moving in straight lines. Current methods typically rely on extensive 'pilot overhead,' essentially a lengthy handshake process where the system tries out many different beam directions to find the best one. This is slow, consumes significant power, and eats up valuable airtime. For drones, this translates directly to shorter flight times, delayed command execution, and dropped sensor data. A drone trying to stream 4K video while navigating a dense city might experience blurry frames or missed obstacles with every signal hiccup. The fundamental limitation is that existing approaches aren't smart enough to quickly adapt and learn the optimal beam without exhaustive trial-and-error, especially when reflections and obstructions constantly change the game.
AI That Intelligently Learns the Best Signal Path
The authors introduce a beam training framework based on a linear bandit algorithm, specifically using Thompson Sampling (TS). Think of it like this: your drone needs to find the best way to point its antenna (the 'beam') to receive a strong signal. Instead of blindly trying every single direction (which is what high pilot overhead implies), the bandit algorithm learns over time. It tries a few directions, sees which ones work best, and then focuses its efforts more on those promising paths while still occasionally exploring new ones to ensure it hasn't missed an even better option. This intelligent balance of exploration and exploitation is key.
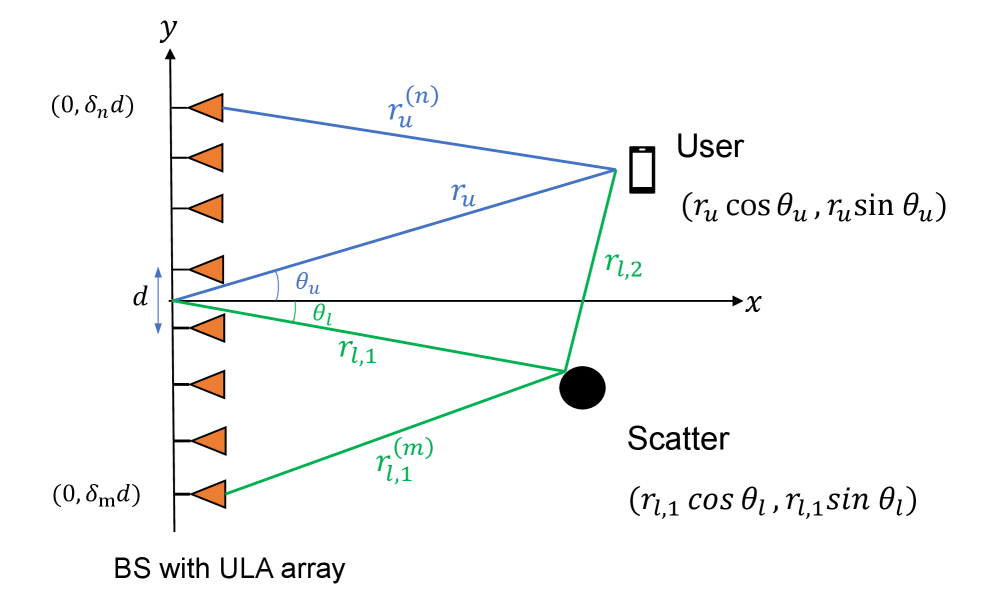
Figure 1: Diagram of the near-field communication system featuring a ULA.
To make this learning incredibly efficient, the framework incorporates a 'correlated Gaussian prior' in the Discrete Fourier Transform (DFT) domain. What this means in plain English is that the system uses its prior knowledge about how radio signals generally behave in space – that nearby angles often have similar signal characteristics. A Gaussian kernel is used to model this spatial correlation, effectively allowing the AI to learn faster by making educated guesses about un-sampled directions. This is crucial for near-field, where energy can 'leak' into adjacent angular directions, and the kernel helps capture that nuance.
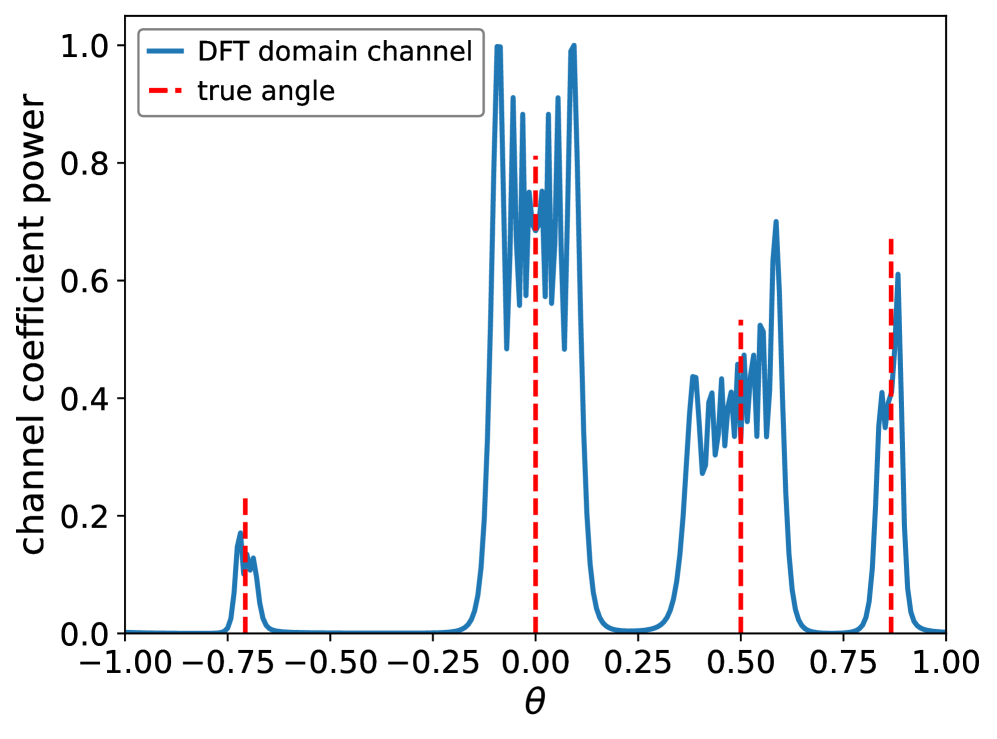
Figure 2: Influence of power leakage on the angular domain and the corresponding RBF kernel.
The paper proposes three specific TS strategies, each with its own trade-offs:
- Codebook-constrained search: This is for rapid convergence, using a pre-defined set of beam directions. Faster, but potentially less optimal.
- Continuous-space search: This aims for the absolute best performance by exploring all possible beam directions. Slower, but can achieve near-optimal results.
- Two-stage hybrid refinement: A middle ground, balancing speed and accuracy, starting broad and then refining.
Hard Numbers: Cutting Overhead, Boosting Signal Strength
The simulation results are compelling and directly address the pain points of current drone communication:
- Pilot Overhead Reduction: The proposed framework reduces pilot overhead by an impressive up to 90% compared to baselines. This means faster connection setup, less wasted energy, and more time for actual data transfer.
- SNR Gain: It achieves more than a 2dB SNR gain over baselines in multi-path environments. A 2dB gain is significant in wireless communication; it can mean the difference between a stable, high-throughput link and a struggling, intermittent one.
- Asymptotic Optimality: The continuous-space search strategy is shown to be asymptotically optimal, meaning that given enough time (unconstrained pilot overhead), it approaches the
full-CSI bound– the theoretical maximum performance if the system had perfect knowledge of the channel.
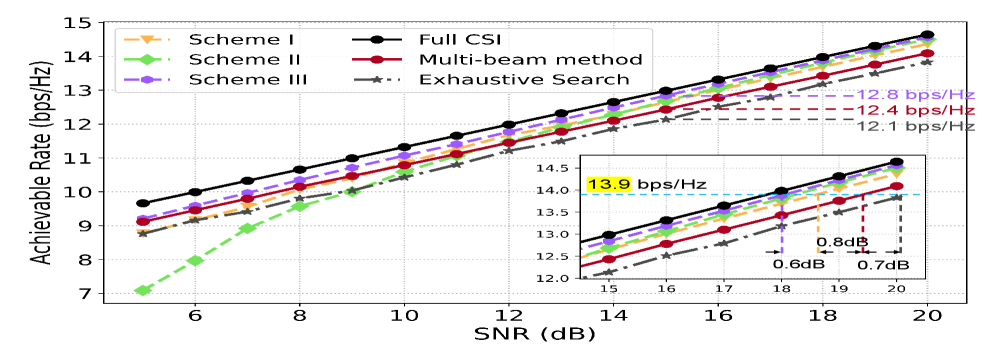
Figure 3: Achievable rate performance vs. SNR of various schemes under finite maximum pilot overhead constraints.
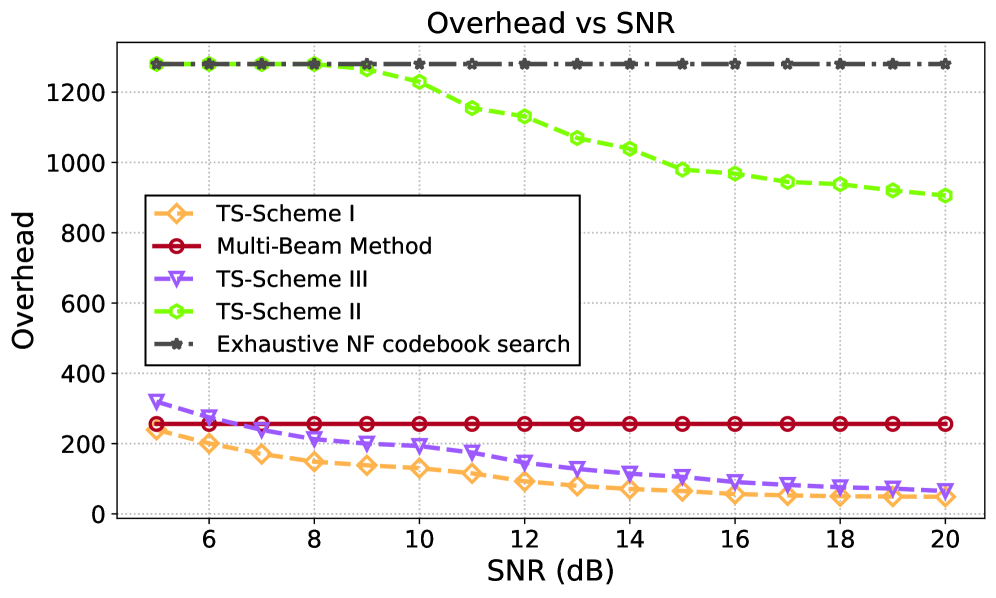
Figure 4: Beam Training Pilot Overhead versus SNR of various schemes.
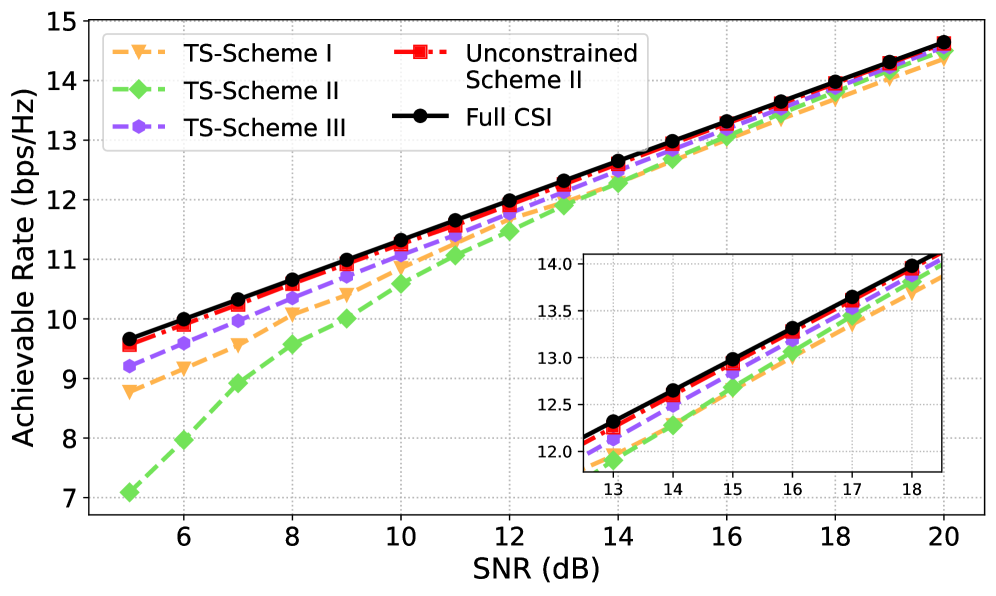
Figure 5: Achievable rate versus SNR: Comparison between the unconstrained Scheme II and various schemes under finite pilot overhead constraints.
Why This Matters for Drone Operations
This isn't just an academic exercise; it's a blueprint for significantly more reliable and efficient drone operations. For drone hobbyists and builders, this could mean:
- Truly Robust Swarm Communications: Less pilot overhead means more drones can communicate efficiently without interfering, enabling larger, more coordinated swarms for tasks like environmental monitoring or search and rescue.
- High-Fidelity Data Transfer: Smooth, unbroken high-bandwidth links for streaming uncompressed 4K video, real-time LiDAR point clouds, or high-resolution thermal data from industrial inspections. This unlocks new levels of detail and immediacy.
- Urban and Forest Penetration: Drones operating in traditionally challenging environments – dense urban canyons with reflective buildings or thick forests with signal-absorbing foliage – will experience dramatically fewer dropped signals and maintain stronger links.
- Extended Flight Times: Reduced pilot overhead translates directly to lower power consumption for communication, freeing up battery life for longer missions or heavier payloads.
- Enabling Autonomy: A virtually unbreakable communication link is fundamental for truly autonomous drones, reducing the reliance on human intervention and ensuring critical commands and telemetry are always received.
Limitations & What's Missing
While promising, it's important to frame this research within its current stage. The results are from simulations, not real-world hardware. While simulations are critical for proving concepts, real-world deployment introduces complexities like hardware imperfections, thermal noise, and rapidly changing environmental factors that might affect performance.
Another point is the assumption of a Uniform Linear Array (ULA) antenna. Drones often use different antenna geometries, and adapting this framework to more complex arrays (e.g., planar arrays) would require further research. The computational overhead of the continuous-space search, while asymptotically optimal, could also be a concern for resource-constrained drone processors, requiring optimized implementations or specialized edge AI hardware.
Finally, while the paper highlights 'adaptive' learning, the speed of adaptation to extremely dynamic multi-path changes (e.g., a drone flying rapidly through a complex environment with many moving obstacles) needs further investigation. How quickly can the bandit algorithm re-learn the optimal beam in milliseconds? This is crucial for high-speed drone applications.
DIY Feasibility: Not Yet for Your Workbench
For the average drone hobbyist, replicating this research isn't feasible today. The core of this work relies on advanced massive MIMO antenna arrays and sophisticated Software-Defined Radio (SDR) hardware capable of near-field beamforming, which are not consumer-grade components. While the underlying Thompson Sampling algorithm is software-based, integrating it with the necessary RF front-end for near-field communication requires deep expertise in wireless communication systems engineering. There's no mention of open-source code for the specific implementation discussed, meaning this technology is likely years away from being accessible for custom drone builds, though the concepts are certainly inspirational.
The Bigger Picture: Smarter AI Needs Smarter Comms
This work on efficient communication ties directly into broader advancements in drone intelligence. For instance, robust and efficient communication, as enabled by this paper, is absolutely essential for drones to share sophisticated visual understandings with each other or a central command. When AI models like those in "From Semantics to Pixels: Coarse-to-Fine Masked Autoencoders for Hierarchical Visual Understanding" generate complex visual data, reliable comms ensure that detailed insights aren't lost in transmission. Similarly, for drones operating in diverse and unpredictable environments, AI models need to adapt. "Unsupervised Domain Adaptation with Target-Only Margin Disparity Discrepancy" tackles this, but their ability to process and share data from unfamiliar terrains heavily relies on the rock-solid communication infrastructure described here. Even high-level cognitive capabilities, such as the 'spatial intelligence' benchmarked in "Stepping VLMs onto the Court: Benchmarking Spatial Intelligence in Sports," would crumble without the ability for drones to share sensor data, VLM outputs, and coordinate complex actions in real-time. This paper is a fundamental building block for the next generation of truly intelligent, autonomous drone systems.
Ultimately, this research moves us closer to a future where drone communication isn't just about sending signals, but about intelligently managing the radio environment itself, ensuring that your drone always gets the message, no matter where it flies.
Paper Details
Title: Efficient, Adaptive Near-Field Beam Training based on Linear Bandit Authors: Junchi Liu, Zijun Wang, Rui Zhang Published: March 2026 arXiv: 2603.09893 | PDF
Written by
The Flight DeskSharing knowledge about drones and aerial technology.
More from Mini Drone Shop
Stop Wandering: Metacognitive AI Makes Drones Smarter, Not Just Faster

Unmasking the Invisible: Polarization Powers Drone Camouflage Detection
Drones Understand 'Past the Truck,' Even When It's Hidden