Scaling Drone Swarms: A New Approach to Sampled-Data Control
This paper introduces a novel control framework inspired by MeanFlow, allowing for efficient, few-step steering of large drone swarms by learning control coefficients for sampled-data systems.
TL;DR: This research presents a new control learning framework that efficiently steers large-scale drone swarms (hundreds to thousands) in just a few control updates. It tackles the real-world challenge of sampled-data systems by learning a control coefficient for finite intervals, making swarm management scalable and practical.
From Individual Drones to Swarm Orchestration
Controlling a single drone is complex enough. Now, multiply that by hundreds, or even thousands, and the challenge quickly escalates from a complex engineering problem to a computational nightmare. Traditional methods often falter under the weight of managing each individual drone's trajectory, leading to bottlenecks in computation and communication. This paper, "MeanFlow Meets Control: Scaling Sampled-Data Control for Swarms," offers a compelling alternative: don't manage the individual drones, manage the flow.
The Bottleneck of Swarm Control
The core challenge with large drone swarms isn't simply the number of agents; it's the inherent limitations of how we typically interact with them. Imagine trying to direct a thousand individual dancers, each with their own complex moves, all at once. This is the computational equivalent of what traditional swarm control faces.
Most real-world control systems operate in a sampled-data fashion. This means control inputs aren't continuously applied; they're updated intermittently and then held constant over a finite interval. Think of it like a human pilot making discrete adjustments every few seconds, rather than a continuous, analog input. For a single drone, this is manageable. For a thousand, trying to calculate and send unique, optimal control signals for each drone at every sampling interval becomes computationally intractable and communication-intensive. The sheer volume of data required to track and command each agent, coupled with the latency inherent in real-time systems, quickly limits both the size and agility of the swarm. This N-body problem for control has long been a barrier to truly scalable drone operations.
Steering the Swarm's Flow, Not Each Drone
The authors introduce a control-space learning framework inspired by MeanFlow—a concept typically used to describe the macroscopic behavior of large particle systems, much like how fluid dynamics describes the movement of water molecules without tracking each one. Instead of directly calculating individual control inputs u for each drone, their innovative approach learns a single interval coefficient c_k. This c_k then parameterizes the finite-horizon minimum-energy control over an entire sampling interval [t_k, t_{k+1}]. Essentially, instead of telling each drone exactly what to do at every tiny moment, you're learning a collective 'recipe' for how the swarm should behave over a block of time, simplifying the control problem dramatically.
This coefficient c_k isn't some abstract value; it's intelligently derived from the swarm's current distribution ρ_0 and its desired target distribution ρ_1. The framework employs a stop-gradient training objective to learn this coefficient efficiently, ensuring the learning process is stable and effective. The real genius here is that the learned coefficient is used directly in sampled-data updates, which means the system inherently respects the prescribed drone dynamics and actuation maps. This consistency with how real control systems operate is crucial for practical deployment. By abstracting away individual drone control in favor of managing the swarm's overall flow, the method achieves massive scalability, eliminating the need for complex, individual calculations for every drone at every time step.
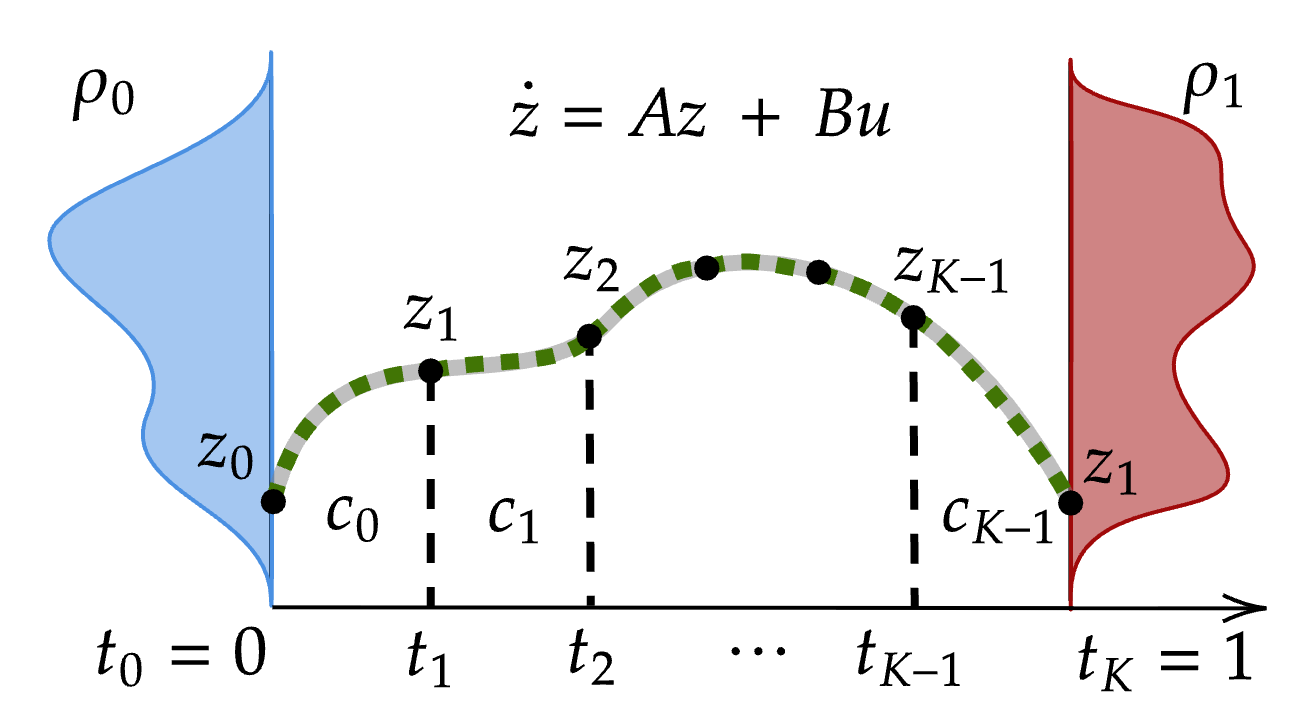
Figure 1: Swarm distribution evolves from an initial law ρ0 at t0=0 to a target law ρ1 at tK=1 under the linear dynamics z˙=Az+Bu. The proposed model learns an interval coefficient ck=cθ(zk,tk,tk+1), which generates the finite-horizon minimum-energy control over [tk,tk+1].
Orchestrating Hundreds with Ease
The paper demonstrates that this MeanFlow-inspired approach can effectively steer large swarms in very few control updates. This is crucial for applications where rapid reconfiguration or long-distance travel is required. The illustrations in the paper show complex maneuvers, like re-forming intricate 2D and 3D shapes.
For example, the swarm can transition from forming the letters “AYKJ” to “DCJK” in a 2D plane, showcasing precise control over the overall distribution.

Figure 2: Two-dimensional case: swarm from “AYKJ” to “DCJK”.
In 3D, the framework guides a swarm from a pyramid formation to a torus, a non-trivial transformation that highlights the method's capability to handle significant changes in swarm geometry.

Figure 3: Three-dimensional case: swarm from pyramid to torus.
The framework also demonstrates the ability to execute rotational maneuvers, suggesting a high degree of flexibility in steering swarm distributions.

Figure 4: Swarm performing a 2D rotational maneuver.

Figure 5: Swarm performing a 3D rotational maneuver.
These examples underscore the method's efficiency in controlling large numbers of agents (the abstract mentions hundreds or thousands) without the computational burden of individual control, all while adhering to the sampled-data nature of real systems. The efficiency comes from learning how to control over an interval, rather than calculating instantaneous control. This is a significant step towards practical, large-scale swarm deployment.
What This Means for Drone Operations
This work fundamentally shifts how we might design and deploy large drone swarms. For drone builders and engineers, this means:
- Scalability for Real-World Tasks: This approach enables hundreds or even thousands of drones to conduct detailed inspections of vast structures like bridges, wind farms, or building facades, as explored in "Can Large Multimodal Models Inspect Buildings?" by Zhong et al. (related paper 2). This control method could provide the underlying orchestration, allowing for unprecedented coverage and detail in autonomous inspection missions.
- Efficient Logistics: Large-scale package delivery or inventory management in massive warehouses could leverage this approach for coordinated movement and path optimization, significantly improving throughput and reducing operational costs in complex environments.
- Environmental Monitoring: Covering huge areas for agricultural analysis, wildlife tracking, or disaster assessment becomes more feasible when swarms can be steered as a cohesive unit, providing comprehensive data collection over expansive terrains.
- Complex Formations: For entertainment or artistic displays, precise, large-scale swarm choreography could be programmed with fewer control updates, simplifying the planning and execution of intricate aerial shows.
- Reduced Communication Burden: By operating with
few-step control updates, the demand for constant, high-bandwidth communication between a central controller and individual drones is significantly reduced. This not only saves energy but also improves robustness and reliability, especially in challenging environments with limited connectivity.
The Road Ahead: Limitations and Next Steps
While promising, this research, like any early-stage work, has its boundaries. The authors explicitly state an assumption of linear time-invariant dynamics. Real-world drones are rarely perfectly linear; their dynamics change with battery life, payload, and environmental factors. Extending this framework to handle non-linear and time-varying dynamics is a critical next step.
The minimum-energy control objective, while efficient, might not always align with all practical missions. For instance, obstacle avoidance, strict collision prevention between individual drones, or highly dynamic environments with unpredictable changes aren't explicitly addressed by controlling the macroscopic flow rather than individual trajectories. Integrating these safety-critical aspects will be essential for real-world deployment.
Furthermore, the framework relies on knowing the swarm's state z_k effectively—its distribution. This implies robust localization and mapping capabilities for each drone, especially in complex, GPS-denied, or dynamic environments. This is precisely the challenge highlighted by HortiMulti: A Multi-Sensor Dataset for Localisation and Mapping in Horticultural Polytunnels by Xu et al. (related paper 3). Without reliable individual drone positioning, the MeanFlow control could become unpredictable.
Finally, the training aspect requires data to learn the coefficient c_theta. While not explicitly detailed as a limitation, the quality and quantity of this training data would significantly impact performance. On the individual drone level, integrating capabilities like those discussed in TinyML Enhances CubeSat Mission Capabilities by Capogrosso and Magno (related paper 1) could make each drone smarter and more self-sufficient, perhaps enabling onboard local decision-making that complements the swarm's overall flow control.
Replicating This in Your Workshop?
For the average hobbyist or even a small engineering team, replicating this framework from scratch would be a significant undertaking. The theoretical underpinnings require a strong background in control theory and machine learning, particularly in areas like optimal transport or fluid mechanics applied to control. There's no mention of open-source code or easily accessible toolkits, suggesting this is currently more of a research-level endeavor. The hardware itself would be standard drones capable of reporting state and accepting control inputs, but the control stack would be custom and complex.
This isn't a weekend project, but it lays crucial groundwork. As the field matures, we might see abstractions and tools emerge that make such advanced swarm control more accessible. For now, it's a look into the future of what's possible.
Paper Details
Title: MeanFlow Meets Control: Scaling Sampled-Data Control for Swarms Authors: Anqi Dong, Yongxin Chen, Karl H. Johansson, Johan Karlsson Published: March 2026 (arXiv v1) arXiv: 2603.20189 | PDF
Written by
Mini Drone Shop AISharing knowledge about drones and aerial technology.