NeFTY: Drone 'X-Ray Vision' for Hidden Defects in Materials
A new thermal tomography framework called NeFTY enables quantitative 3D reconstruction of material properties from surface temperature. This could give drones "X-ray vision" to find hidden defects and structural weaknesses.

TL;DR: Researchers have developed NeFTY, a novel thermal tomography method that reconstructs 3D material properties from surface temperature changes. It uses a physics-constrained neural network to accurately map subsurface defects, offering drones a powerful new non-destructive evaluation capability.
Peering Beneath the Surface
Drones are already indispensable for visual inspections, but what if they could see through surfaces? A new technique, Neural Field Thermal Tomography, or NeFTY, promises to give our aerial platforms a form of "X-ray vision." It's a sophisticated method for quantitative 3D mapping of material properties and hidden flaws, all from transient surface temperature measurements.
The Problem with Current Thermal Scans
Inspecting critical infrastructure, composite materials, or even conducting search and rescue operations often demands peering beneath the surface without causing damage. Current non-destructive evaluation (NDE) techniques like traditional thermography often fall short, relying on overly simplified 1D models that ignore crucial lateral heat spread. Consequently, they miss complex subsurface structures or defects. More advanced methods, such as Physics-Informed Neural Networks (PINNs), struggle with 'gradient stiffness' in transient heat diffusion, leading to unstable or inaccurate results when mapping rapidly changing thermal fields. The inverse heat conduction problem (IHCP) itself is notoriously ill-posed; tiny differences on the surface can correspond to vastly different internal structures, making accurate reconstruction a significant challenge.

Figure 1: Overview of setup. A high-speed camera enables measurements of time-resolved transient surface temperature variations following localized heating with a pulsed laser. NeFTY uses these transient measurements to reconstruct the 3D subsurface diffusivity field and reveal hidden defects.
How NeFTY Achieves 3D Insight
NeFTY addresses these challenges by building a rigorous, differentiable physics framework. Instead of trying to guess material properties from surface data, it parameterizes the 3D diffusivity field as a continuous neural field. The system then optimizes this neural field by minimizing the discrepancy between simulated and measured surface temperatures. A key innovation is the differentiable physics solver. This solver doesn't just simulate; it's designed to make the thermal evolution process differentiable, enabling efficient error backpropagation through the simulation via an adjoint method.
This "discretize-then-optimize" approach ensures that thermodynamic laws are enforced as hard constraints, not just soft penalties. By embedding the physics directly into the optimization loop, NeFTY avoids the spectral bias and ill-posedness that plague other methods. The neural field representation also offers memory efficiency, crucial for high-resolution 3D tomography. Essentially, the system learns the internal structure by iteratively refining its 3D material property map until its predicted surface temperature matches what the high-speed thermal camera observed after a pulsed laser heat source.
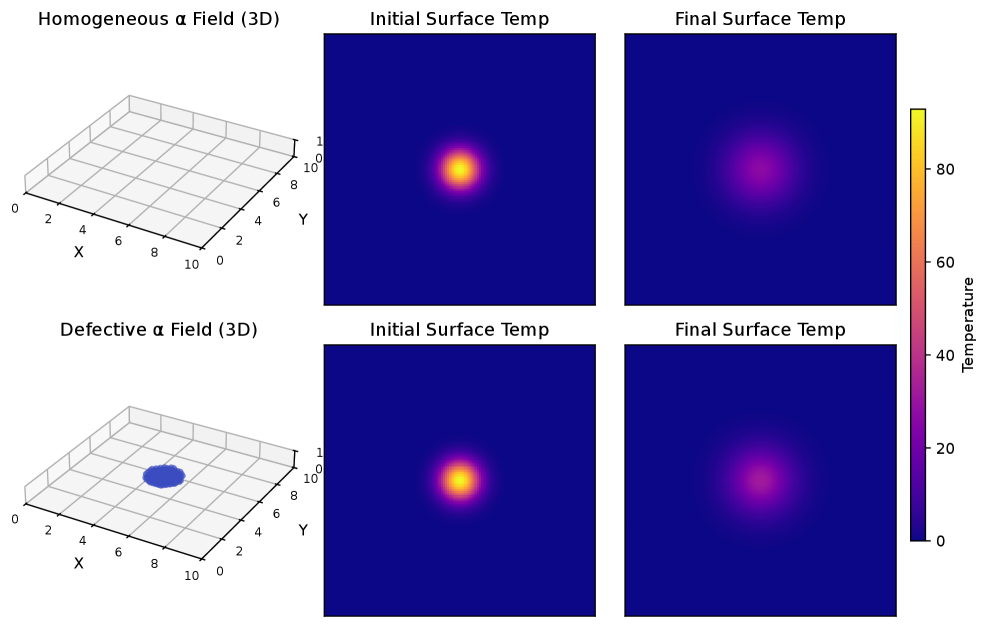
Figure 2: The Ill-Posedness of IHCP. Distinct internal structures (left), homogeneous vs. defective, produce nearly indistinguishable surface temperature profiles (right), illustrating the severe loss of high-frequency spatial information caused by diffusive smoothing.
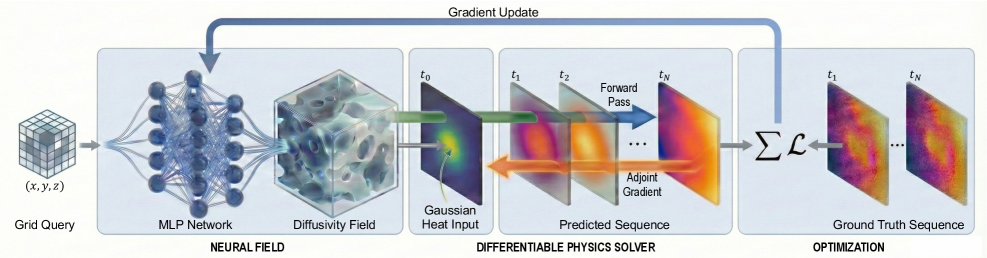
Figure 3: Overview of NeFTY. Our method combines an implicit neural representation for the 3D diffusivity field with a differentiable physics solver. The network learns the internal structure by minimizing the error between simulated and measured surface temperatures, using the adjoint method for efficient gradient backpropagation through the transient thermal simulation.
Impressive Reconstruction Accuracy
The experimental validation, primarily on synthetic data, shows NeFTY significantly outperforms existing baselines in accurately localizing and characterizing subsurface defects.
- Accuracy: NeFTY successfully localizes and sizes defects with sharp boundaries, even in complex multi-layered materials.
- Robustness: It handles various defect densities, from single voids to four distinct scatters, maintaining geometry and separation.
- Baselines:
- PINN: Frequently fails, saturating to trivial solutions or struggling to converge to meaningful structures due to gradient pathology. Its surface temperature error shows structured patterns, indicating a fundamental mismatch with the underlying physics.
- Grid Optimization: Produces physically consistent results but often noisy, exhibiting significant ringing artifacts around defects and blurry predictions.
- Sound-Only U-Net: Struggles with out-of-distribution defects, often failing to detect them or ghosting their presence entirely.
- Error: NeFTY consistently achieves the lowest residual
L1 errorbetween predicted and ground truth surface temperatures over time, indicating a precise fit to the thermal decay curve.
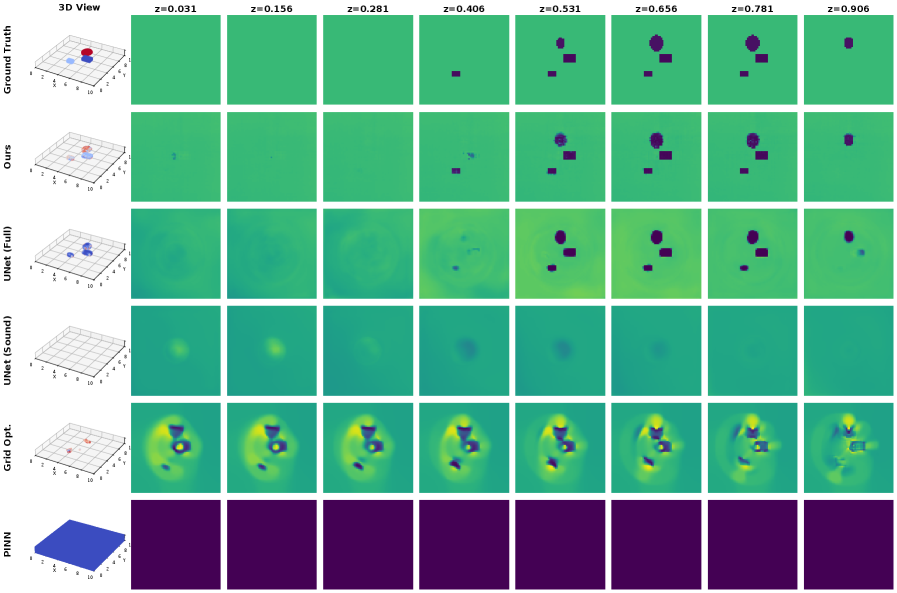
Figure 4: Depth-wise slices of the recovered diffusivity field (Homogeneous Setting). NeFTY (Ours) successfully localizes and sizes the subsurface defects (red/blue shapes) with sharp boundaries. The PINN baseline saturates to a trivial solution due to gradient pathology. The Grid Opt. baseline is physically consistent but noisy. The Sound-Only U-Net fails to detect the OOD defects.
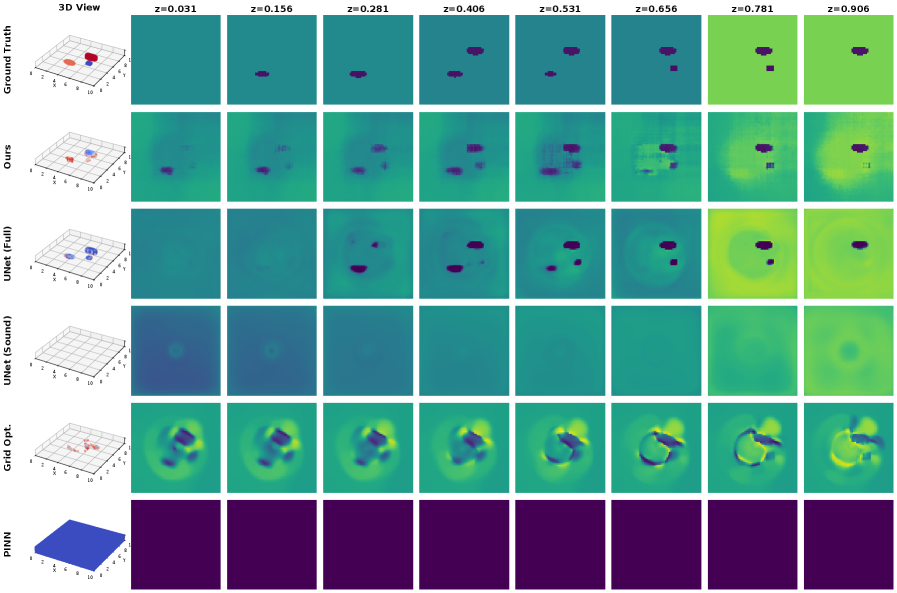
Figure 5: Qualitative Results (Layered Composite Setting). Comparison of reconstruction quality in a multi-layered material. NeFTY correctly resolves both the layer transitions and the embedded defects. The baselines struggle with the complex heterogeneity. Grid Opt. introduces significant artifacts at layer interfaces, while the PINN again fails to converge to a meaningful structure.
The Drone Advantage: True Material Insight
NeFTY represents a significant step towards truly autonomous, non-contact NDE for drones. Consider a drone equipped with a pulsed laser and a high-speed thermal camera, flying over a bridge, a wind turbine blade, or a composite aircraft wing. Instead of just visually flagging surface anomalies, it could build a 3D map of the material's internal structure, pinpointing delaminations, voids, or material degradation before they become critical.
- Industrial Inspection: Drones could inspect pipelines for corrosion, detect flaws in welds, or assess composite structures for manufacturing defects.
- Infrastructure Maintenance: Drones could scan bridge decks, concrete structures, or historical buildings for hidden cracks or water ingress without scaffolding or physical contact.
- Search and Rescue: While not immediately obvious, the ability to map subsurface properties could potentially aid in locating buried victims by identifying anomalies in soil or debris thermal signatures, though this would require significant adaptation.
- Manufacturing Quality Control: Drones could perform rapid, automated quality checks on large components, ensuring material integrity.
This moves beyond simple thermal imaging, which only shows surface temperature, towards actual 3D material property tomography. It's about giving drones the ability to truly understand the integrity of what they're looking at, not just its external appearance.
Roadblocks to Real-World Drone Deployment
While NeFTY shows impressive capabilities, several aspects need consideration for real-world drone deployment:
- Synthetic Data: The current validation is primarily on synthetic data. Real-world materials introduce complexities like varying surface emissivity, environmental noise, and more complex thermal boundary conditions that are harder to model perfectly.
- Hardware Requirements: A pulsed laser and a high-speed thermal camera are precise instruments. Integrating them onto a drone platform requires careful consideration of weight, power consumption, stabilization, and environmental resilience (dust, rain, vibration). The current setup in Figure 1 looks like a lab setup, not drone-ready.
- Heat Source: A pulsed laser is great for controlled lab experiments, but for inspecting large areas from a drone, a more distributed or rapid scanning heat source might be necessary, posing new challenges for power and effective area coverage.
- Stand-off Distance: The paper doesn't detail the effective stand-off distance for accurate measurements. Drones need to operate at a safe distance from structures, and this distance could impact laser power requirements and thermal camera resolution.
- Computational Load: While memory-efficient for 3D tomography, the differentiable physics solver and neural field optimization are computationally intensive. Real-time inference on a drone's onboard computer might be challenging, likely requiring edge AI hardware or offloading to a ground station.
DIY Feasibility: Not Yet for the Hobby Bench
Replicating NeFTY in a hobbyist setting would be exceptionally challenging. The core of the method relies on a sophisticated differentiable physics solver and implicit neural representations, which are advanced topics in computational physics and machine learning.
- Hardware: A high-speed thermal camera (e.g.,
FLIR X6900scor similar) and a precise pulsed laser are professional-grade, expensive instruments, far beyond typical hobbyist budgets. - Software: While neural networks and physics simulations have open-source libraries, building a differentiable solver from scratch or adapting existing ones for this specific problem is a research-level endeavor. The authors mention "additional details at
https://cab-lab-princeton.github.io/nefty/", which might include code, but it's unlikely to be a plug-and-play solution. For now, this remains firmly in the realm of academic and industrial R&D.
Contextualizing Autonomous Inspection
The development of NeFTY highlights the growing sophistication of autonomous inspection systems. For drones to truly leverage such advanced sensing, improvements in robotic control and environmental awareness are also critical. For instance, Learning Adaptive Force Control for Contact-Rich Sample Scraping with Heterogeneous Materials by Cetin et al. addresses the precision needed for physical interaction, which, while not directly applicable to non-contact thermal tomography, underscores the need for highly precise drone manipulation, even for maintaining a specific standoff distance or scanning path. Similarly, PPGuide: Steering Diffusion Policies with Performance Predictive Guidance by Wang et al. offers methods to enhance robotic policy execution. Ensuring a drone can execute complex, high-precision thermal scans accurately and reliably is paramount, and PPGuide's approach to minimizing errors in action sequences could contribute significantly to robust data collection. Beyond sensing, a comprehensive inspection often requires visual interpretation. GroundCount: Grounding Vision-Language Models with Object Detection for Mitigating Counting Hallucinations by Chen et al. improves the reliability of Vision-Language Models in counting objects, which could complement NeFTY by allowing a drone to reliably count and categorize detected defects or visual features during an inspection.
The Future of Drone Inspection
NeFTY pushes the boundaries of what thermal imaging can achieve, transforming surface temperature data into true 3D material insights. The next challenge is translating this lab-proven "X-ray vision" into robust, deployable drone systems that can unlock unparalleled NDE capabilities in the real world.
Paper Details
Title: Neural Field Thermal Tomography: A Differentiable Physics Framework for Non-Destructive Evaluation Authors: Tao Zhong, Yixun Hu, Dongzhe Zheng, Aditya Sood, Christine Allen-Blanchette Published: March 2026 arXiv: 2603.11045 | PDF
Written by
The Flight DeskSharing knowledge about drones and aerial technology.


